Romi, robotics for micro-farms!
by Marco Sanalitro Posted on December 18, 2017









IAAC Campus in Valldaura Self-Sufficent Labs hosted last week a working session for the ROMI EU project together with IAAC’s partner Sony Computer Science Laboratory Paris to set the starting point and the development plan of this H2020 project.
The main goal of the project, which will be carried on at Valldaura Labs under the direction of Jonantan Minchin, is to develop an open and lightweight robotics platform for micro-farms. After a week of work and sharing, the team analysed and collected data to plan the next steps of the project and the next meetings.
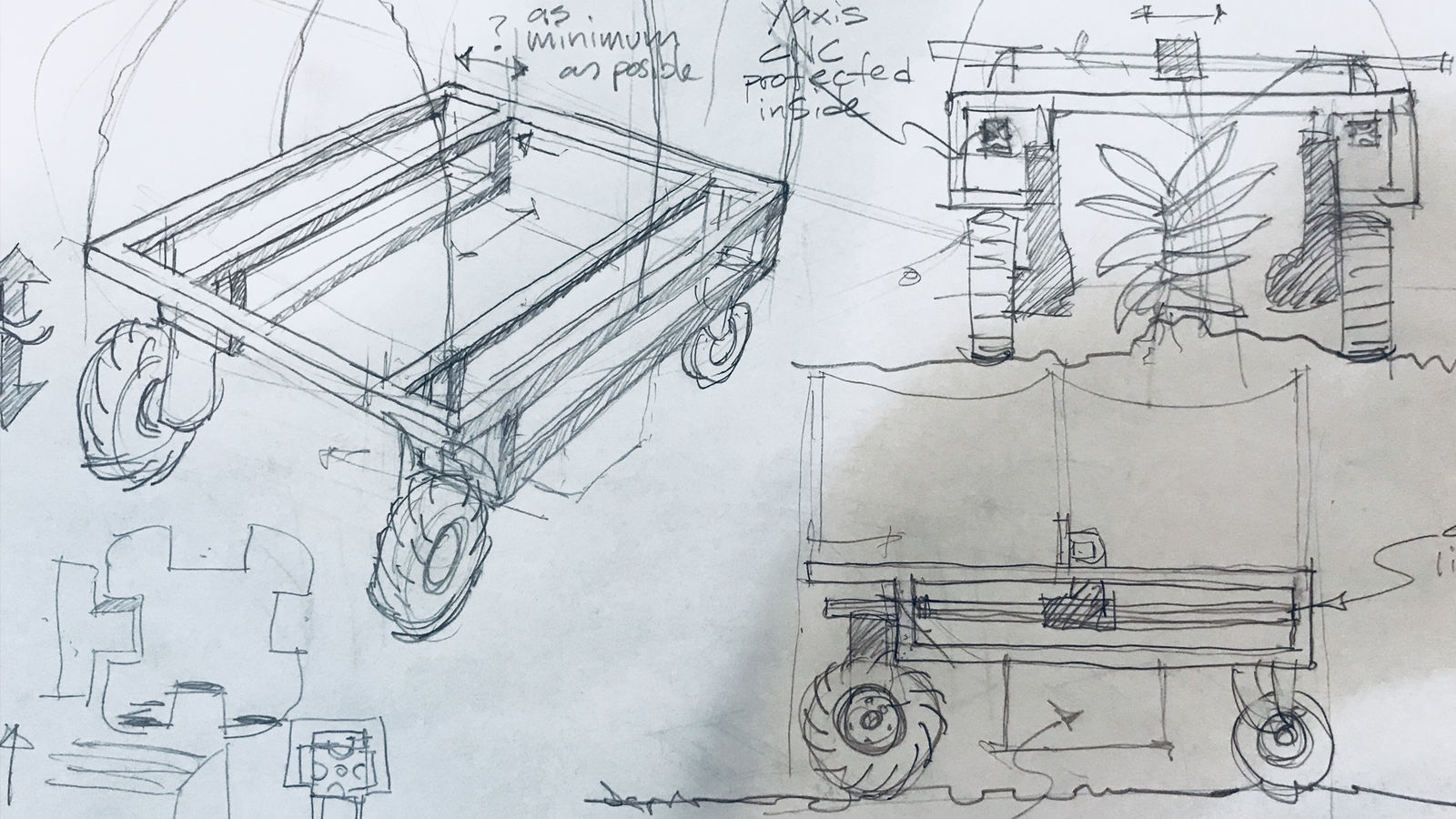
Throughout the week, Sony Computer Science Laboratory Paris team in collaboration with the IAAC , Fab Lab BCN Experts and the support of Noumena team, build and test the first Rover ROMI. The Rover (land robot) acquires detailed information on sample plants and will be coupled with drones that acquire detailed and global information of the crop development and the overall harvest. As a first objective, and proof of concept, the purpose of developing the Rover is to assist in the mechanical control of weeds.
The project is coordinated by the Fab City research lab and brings together subjects such as plant modelling, adaptive learning, and high-performance computing. This research is funded by Horizon 2020 is the biggest EU Research and Innovation programme ever with nearly €80 billion of funding available over 7 years, which promises breakthroughs, discoveries and world-firsts by taking great ideas from the lab to the market.
For more information about ROMI project click HERE